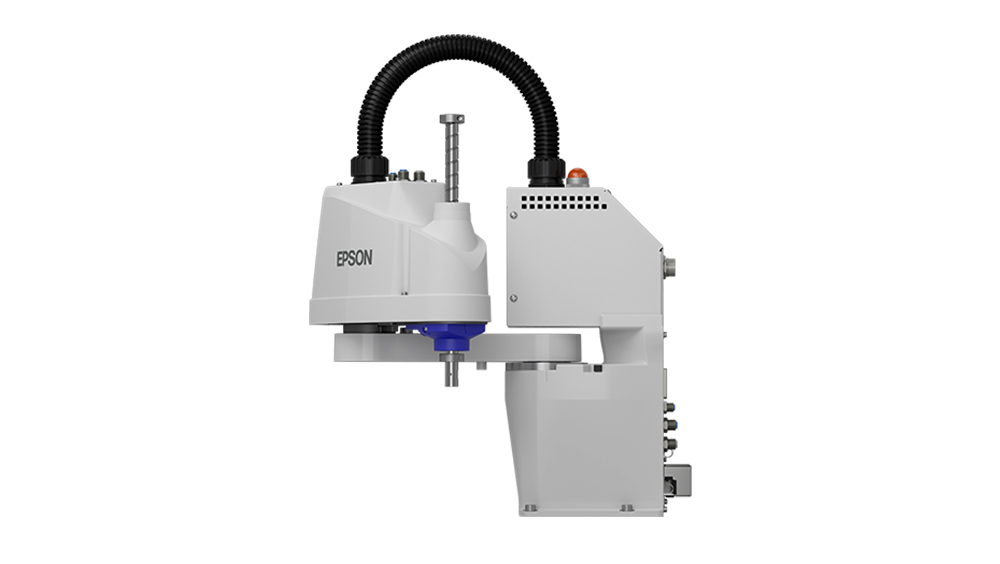
Epson T3-B SCARA Robot
Zoom In






















Close
The ultimate alternative to slide-based systems designed for small workpiece handling
Epson T3-B Series SCARA Robots are equipped with a built-in controller that eliminates the need for complex cabling. They also offer outstanding energy efficiency and feature a batteryless motor unit that help keep total operating costs low. Affordable and cost-efficient, they are ideal for manual task automation and as a replacement for multi-unit, single-axis robot setups that are complicated to set up and maintain.
- All-in-one solution ideal for virtually any application
- Energy efficient (cuts energy consumption by over 50%)*
- Simple I/0 and short cable conduit for easy cabling, and offers payload of up to 3kg
- Batteryless motor unit to reduce running costs and factory downtime
*Compared to Epson LS series robots as of January 2018. Data based on in-house testing; actual energy consumption varies according to workload and operating environment.
For more information on other robot models, please download the range catalogue here.